Our Prototypes
Innovation is an iterative process. Here, we showcase the evolution of our ornithopter designs, highlighting the key milestones and learning experiences from each prototype version.
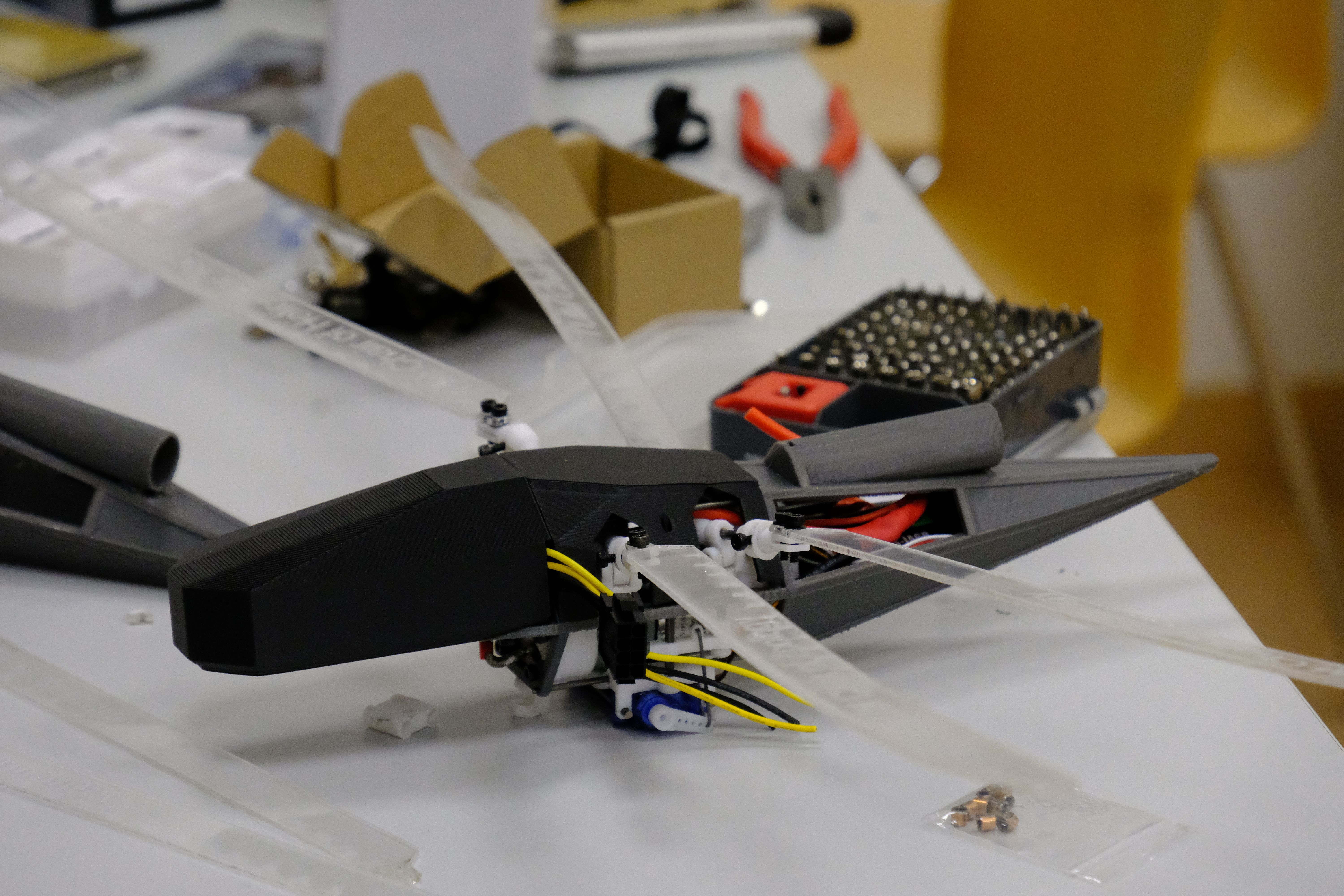
3-MM-1
3-MM-1 is our first prototype to move beyond theoretical design into physical reality. Its primary purpose is to demonstrate the mechanical feasibility of our fundamental control approaches. Core Aspects of 3-MM-1 Mechanical Validation: While not yet capable of flight, this prototype verifies the functionality of key mechanical components of our control systems under real-world conditions. Representation & Outreach: The prototype served as a major attraction at the Studentclubfair 2025 and is an essential tool for demonstrating our technology to the public. Public Display: We are currently working on a solution to display 3-MM-1 at a prominent location near our headquarters at LabCampus (Munich Airport). Role in the Development Cycle As our first physical milestone, 3-MM-1 represents the transition from simulation-only designs to the practical testing of complex mechanics, establishing the groundwork for its successors, Glossu and Rabban.
Key Features:
- Gear free mechanism to transform rotation into flapping
- 4 Axis of controll that allow theoretical controlled flight
- highly integrated visual concept
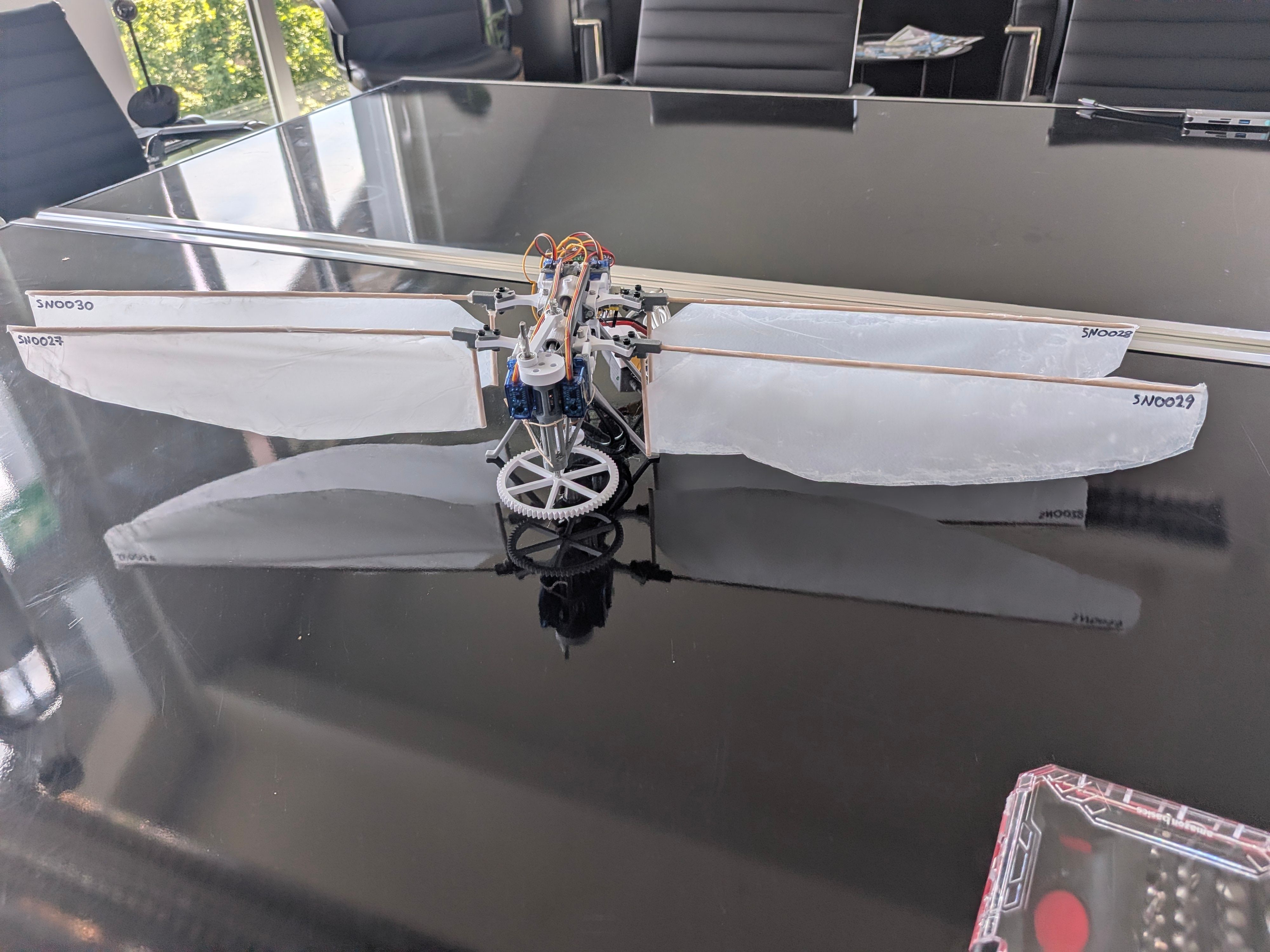
Glossu
Glossu is our initial technology demonstrator, built with the primary objective of generating measurable lift through active wing flapping and validating the physical feasibility of our concept. Core Components of Glossu The Drive Section: Developed by our mechanics team, this section is engineered to meet the requirement of generating lift on a horizontal plane through a controlled flapping motion. The Test Stand: Developed in parallel by our test stand team, this component provides a specialized environment for data acquisition. It allows us to capture detailed recordings of the thrust produced by Glossu and precisely log the system's performance. Developmental Purpose The insights and data gathered from Glossu serve as the fundamental baseline, enabling us to refine the design and performance of our subsequent prototype iterations.
Key Features:
- Basic flapping mechanism
- Modular construction
- Lift generation
Rabban
Rabban is our first prototype destined for airborne flight. It consists of a relatively barebones flyer, which is stripped down to the bare minimum needed to achieve controlled flight. This flyer is tethered to a stationary ground station, which consists of all the necessary controll hardware, along with a power supply. What Rabban should achieve Improve upon the drive system of the Glossu, with a special focus put onto reducing the weight to a point where Rabban is capable of tethered flight. Implement a rudimentary controll scheme to give our developement of controll software something phyiscal to work with. Test out different solutions for reliable wireless communication while having a wired backup. Implementing simulation results Rabban is the first prototype that will be based both on the results of our physical prototyping as well as an expansive simulation campaign performed by our simulations team. The reason for this is, that our simulations team is ahead of the other RnD Teams by roughly one development Cycle, which allows them to have meaningfull results ready, when our design teams start working on a prototype.
Key Features:
- Expanded Flight controlls
- advanced structural design
- advanced telmentrie for data collection
- ...and more

Abulurd
Abulurd represents the next major milestone in our development roadmap. As our first prototype designed specifically for fully untethered free flight, it integrates the collective insights from previous models into a single autonomous system. Planned Features of Abulurd Lightweight Composite Materials: Utilization of advanced composites to minimize structural weight while maximizing payload capacity. Autonomous Flight Control: Implementation of on-board intelligence to enable complex maneuvers without the need for external control inputs. Integrated Power Supply: Transitioning from tethered flight to an internal energy source for maximum operational freedom. Modular Design: A flexible architecture designed to support rapid hardware upgrades and adaptations for various mission profiles. Current Status Abulurd is currently in an early conceptual phase. The design leverages extensive data from preceding simulation campaigns to redefine the boundaries of active wing-flapping flight in an untethered environment.
Key Features:
- lightweight composit materials
- Integrated power system
- autonomous flight controlls
- ...and more