3-MM-1
V0.1 Abgeschlossen
Features
- Zahnradloser Mechanismus um Rotation in Flügelschlag zu wandeln
- 4 Steuerachsen die theoretisch kontrollierten Flug ermöglichen
- Moderne visuelle Konzeption
Beschreibung
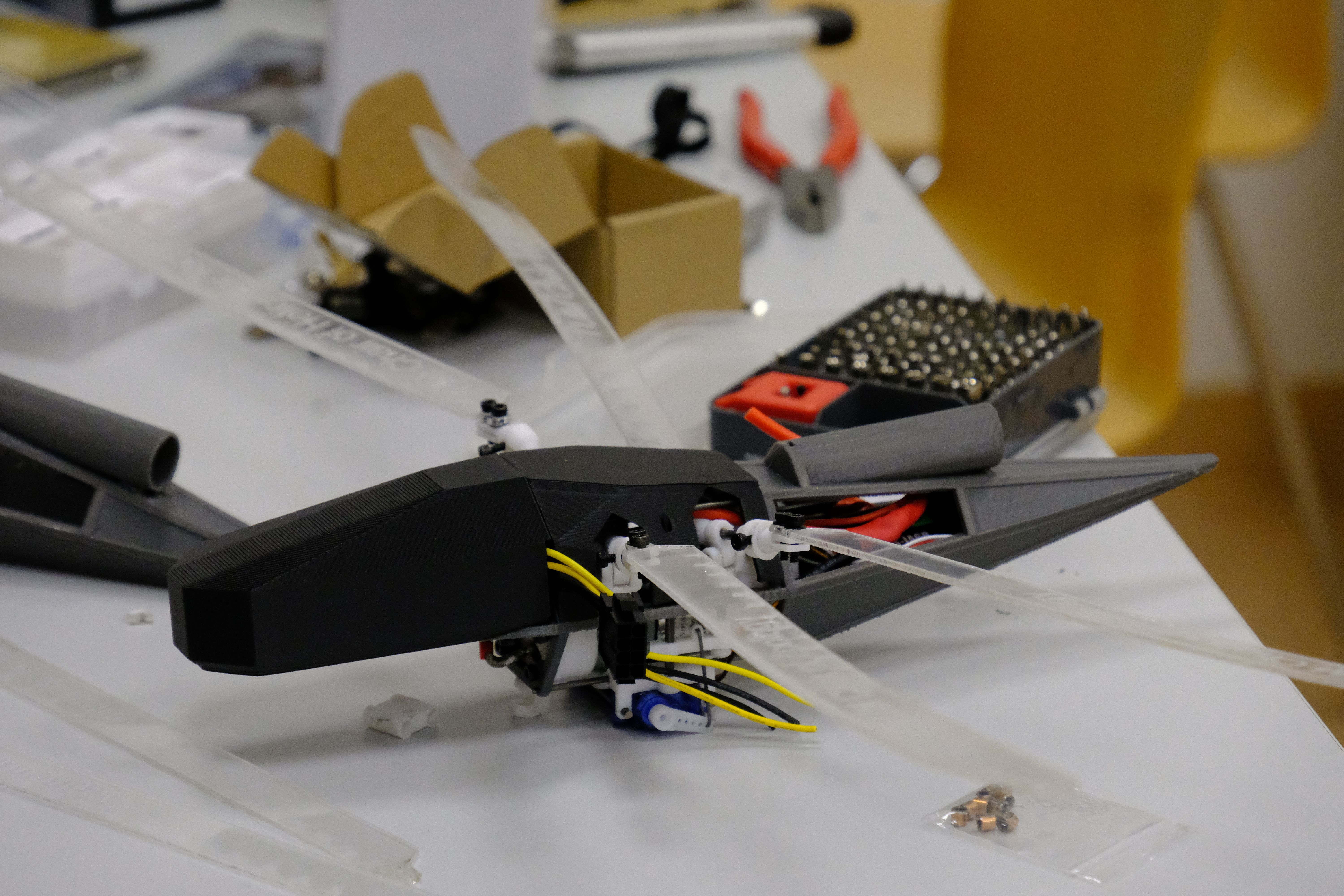
3-MM-1 ist unser erster Prototyp, der den Schritt von der Theorie in die physische Realität vollzogen hat. Er dient primär dazu, die mechanische Machbarkeit unserer grundlegenden Steuerungsansätze zu demonstrieren.
Kernaspekte von 3-MM-1
- Mechanische Validierung: Obwohl dieses Modell noch nicht flugfähig ist, verifiziert es die Funktion wichtiger mechanischer Komponenten unserer Steuerungssysteme unter realen Bedingungen.
- Repräsentation & Outreach: Der Prototyp fungierte als zentraler Anziehungspunkt auf der Studentclubfair 2025 und dient der anschaulichen Vermittlung unserer Technologie.
- Öffentliche Präsentation: Aktuell arbeiten wir an einer Lösung, um 3-MM-1 dauerhaft in der Nähe unseres Hauptquartiers am LabCampus (Flughafen München) auszustellen.
Rolle im Entwicklungszyklus
Als erster physischer Meilenstein markiert 3-MM-1 den Übergang von rein simulationsbasierten Designs hin zur praktischen Erprobung komplexer Mechanik und bildet damit das Fundament für die Nachfolger Glossu und Rabban.