Unsere Prototypen
Innovation ist ein iterativer Prozess. Hier zeigen wir die Entwicklung unserer Ornithopter-Designs und heben die wichtigsten Meilensteine und Lernerfahrungen aus jeder Prototypenversion hervor.
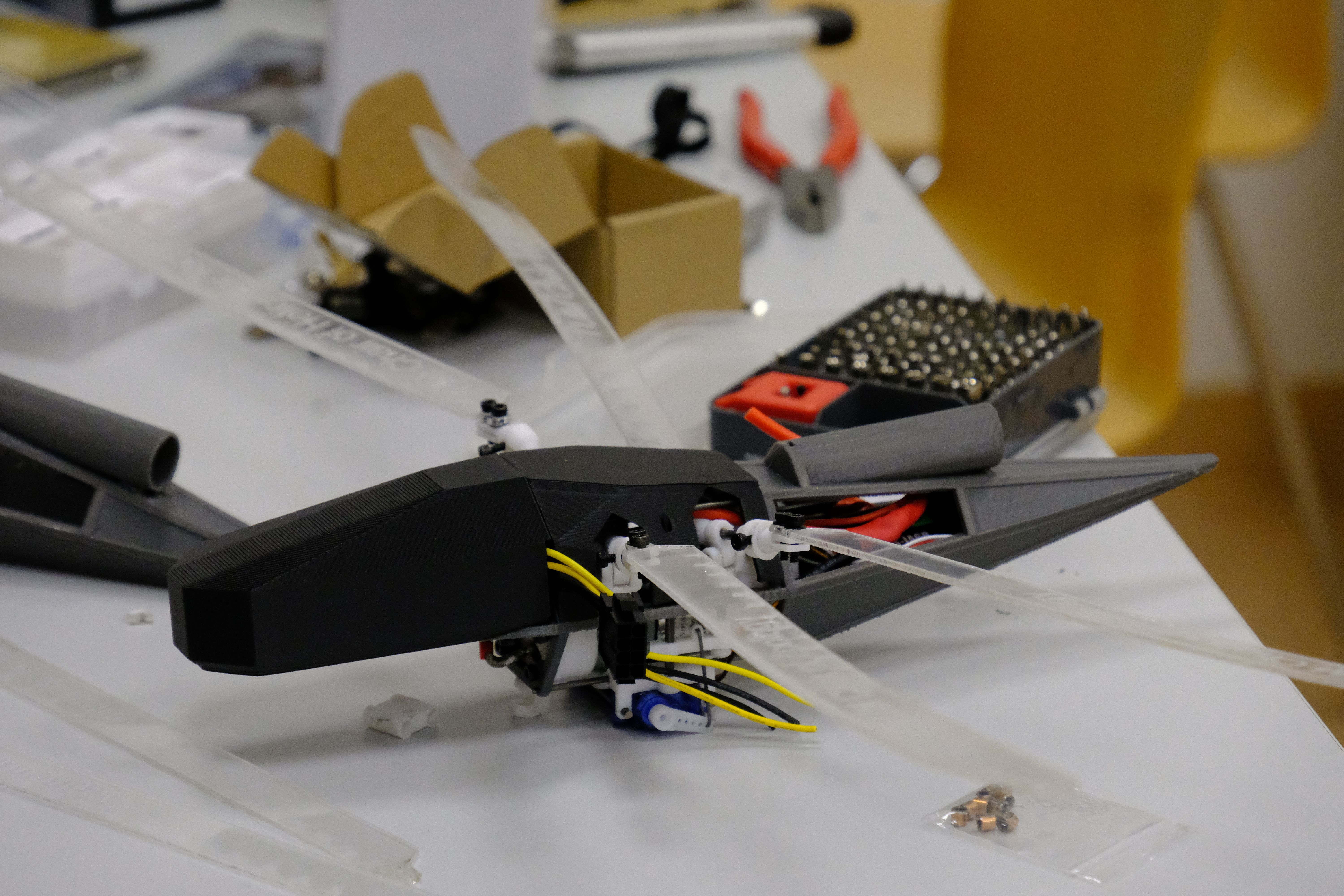
3-MM-1
3-MM-1 ist unser erster Prototyp, der den Schritt von der Theorie in die physische Realität vollzogen hat. Er dient primär dazu, die mechanische Machbarkeit unserer grundlegenden Steuerungsansätze zu demonstrieren. Kernaspekte von 3-MM-1 Mechanische Validierung: Obwohl dieses Modell noch nicht flugfähig ist, verifiziert es die Funktion wichtiger mechanischer Komponenten unserer Steuerungssysteme unter realen Bedingungen. Repräsentation & Outreach: Der Prototyp fungierte als zentraler Anziehungspunkt auf der Studentclubfair 2025 und dient der anschaulichen Vermittlung unserer Technologie. Öffentliche Präsentation: Aktuell arbeiten wir an einer Lösung, um 3-MM-1 dauerhaft in der Nähe unseres Hauptquartiers am LabCampus (Flughafen München) auszustellen. Rolle im Entwicklungszyklus Als erster physischer Meilenstein markiert 3-MM-1 den Übergang von rein simulationsbasierten Designs hin zur praktischen Erprobung komplexer Mechanik und bildet damit das Fundament für die Nachfolger Glossu und Rabban.
Key Features:
- Zahnradloser Mechanismus um Rotation in Flügelschlag zu wandeln
- 4 Steuerachsen die theoretisch kontrollierten Flug ermöglichen
- Moderne visuelle Konzeption
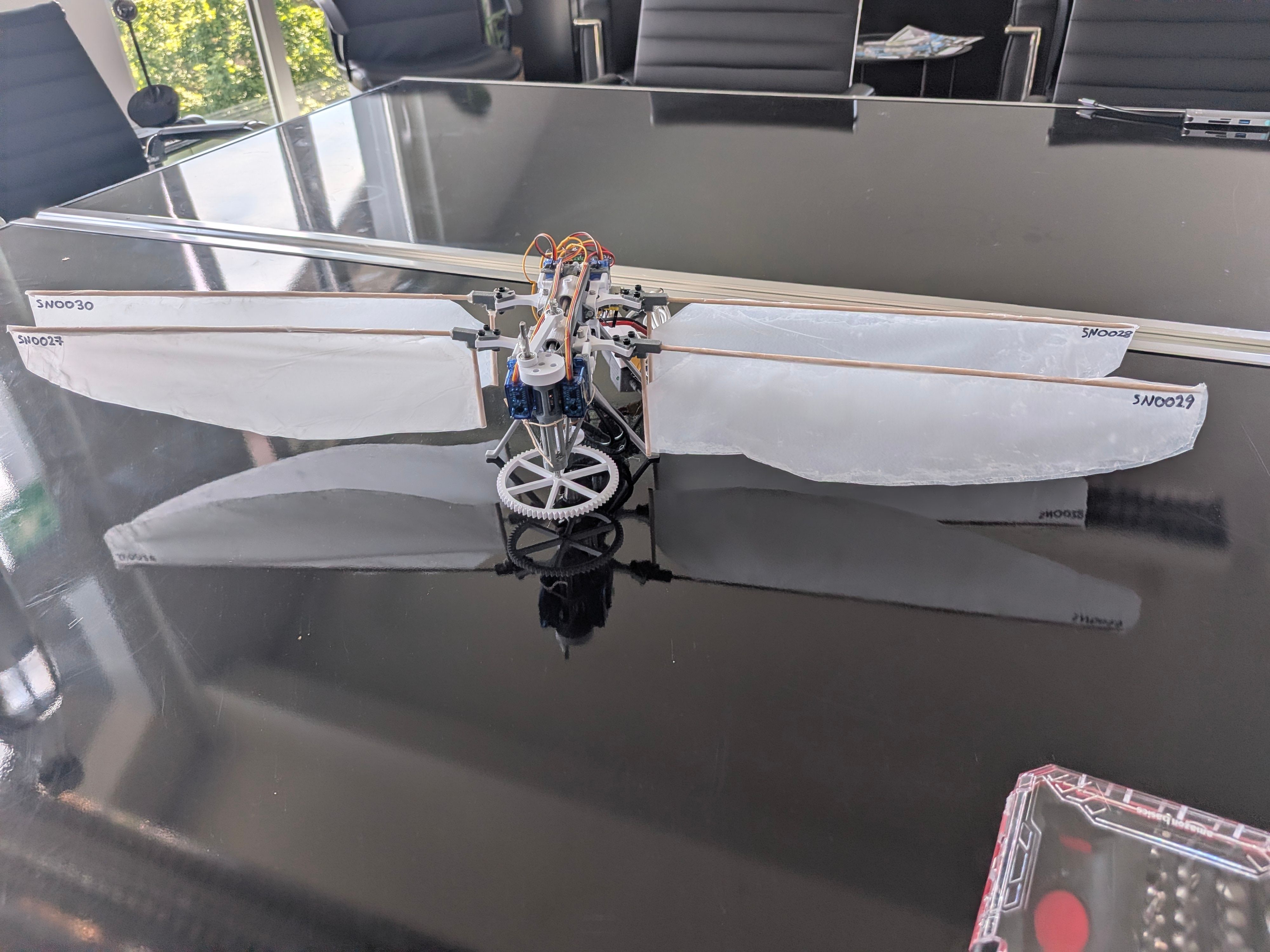
Glossu
Glossu ist unser erster Technologiedemonstrator. Er wurde mit dem primären Ziel entwickelt, messbaren Auftrieb durch aktiven Flügelschlag zu erzeugen und die physikalische Machbarkeit unseres Konzepts zu validieren. Kernkomponenten von Glossu Die Antriebssektion: Diese wird von unserem Mechanik-Team entwickelt. Die zentrale Anforderung besteht darin, durch eine definierte Flügelschlagbewegung auf einer horizontalen Ebene signifikanten Auftrieb zu generieren. Der Teststand: Parallel zur Antriebssektion entwickelt unser Teststand-Team eine spezialisierte Messumgebung. Diese ermöglicht es uns, detaillierte Daten über den erzeugten Schub zu gewinnen und die Effizienz des Systems präzise zu protokollieren. Zweck der Entwicklung Die durch Glossu gewonnenen Erkenntnisse und Aufzeichnungen bilden die fundamentale Datengrundlage, um die Konstruktion und Leistungsfähigkeit unserer nachfolgenden Prototypen gezielt zu verbessern.
Key Features:
- Einfacher Flügelschlag Mechanismus
- Modularer Aufbau
- Erzeugen von Auftrieb
Rabban
Rabban ist unser erster Prototyp, der für den Einsatz in der Luft bestimmt ist. Er besteht aus einem relativ minimalistischen Fluggerät, das auf das Nötigste reduziert wurde, um einen kontrollierten Flug zu ermöglichen. Dieses Fluggerät ist an eine stationäre Bodenstation angebunden, welche die gesamte erforderliche Steuerungshardware sowie eine Stromversorgung enthält. Ziele für Rabban Verbesserung des Antriebssystems der „Glossu“, mit besonderem Fokus auf die Gewichtsreduzierung, bis Rabban zu einem gefesselten Flug fähig ist. Implementierung eines rudimentären Steuerungsschemas, um der Softwareentwicklung eine physische Basis für die Arbeit zu bieten. Testen verschiedener Lösungen für eine zuverlässige drahtlose Kommunikation bei gleichzeitiger Verfügbarkeit eines kabelgebundenen Backups. Implementierung von Simulationsergebnissen Rabban ist der erste Prototyp, der sowohl auf den Ergebnissen unserer physischen Prototypenerstellung als auch auf der umfassenden Arbeit unseres Simulationsteams basiert. Der Grund hierfür ist, dass unser Simulationsteam den anderen RnD-Teams um etwa einen Entwicklungszyklus voraus ist. Dies ermöglicht es ihnen, aussagekräftige Ergebnisse bereitzustellen, sobald unsere Designteams mit der Arbeit an einem Prototyp beginnen.
Key Features:
- Erweiterte Flugsteuerung
- Forgeschrittenes strukturelles Design
- Hochwertige Sensorik für Datensammlung
- ...and more

Abulurd
Abulurd stellt den nächsten großen Meilenstein in unserer Roadmap dar. Als erster Prototyp, der für den vollständig freien Flug konzipiert ist, bündelt er alle Erkenntnisse aus den Vorgängermodellen in einem autonomen System. Geplante Features von Abulurd Leichte Kompositmaterialien: Einsatz fortschrittlicher Verbundwerkstoffe, um das strukturelle Gewicht zu minimieren und die Nutzlastkapazität zu maximieren. Autonome Flugsteuerung: Implementierung einer On-Board-Intelligenz, die komplexe Manöver ohne externe Steuerung ermöglicht. Integrierte Stromversorgung: Übergang vom gefesselten Flug (Tethered Flight) zu einer internen Energiequelle für maximale operative Freiheit. Modulares Design: Eine flexible Architektur, die schnelle Hardware-Upgrades und Anpassungen an verschiedene Einsatzszenarien erlaubt. Aktueller Status Abulurd befindet sich derzeit in einer frühen Konzeptionsphase. Das Design nutzt die umfangreichen Daten der vorangegangenen Simulationskampagnen, um die Grenzen des aktiven Flügelschlags in einer freien Flugumgebung neu zu definieren.
Key Features:
- leichte Kompositmaterialien
- Integrierte Stromversorgung
- Autonome Flugsteuerung
- ...and more